Embark SPAC Presentation Deck
Interactive Planning with Data
Driven Predictions
60 Second, Interaction-Aware Prediction Horizon Unlocks
Optimal Behavior in Challenging Driving Scenarios
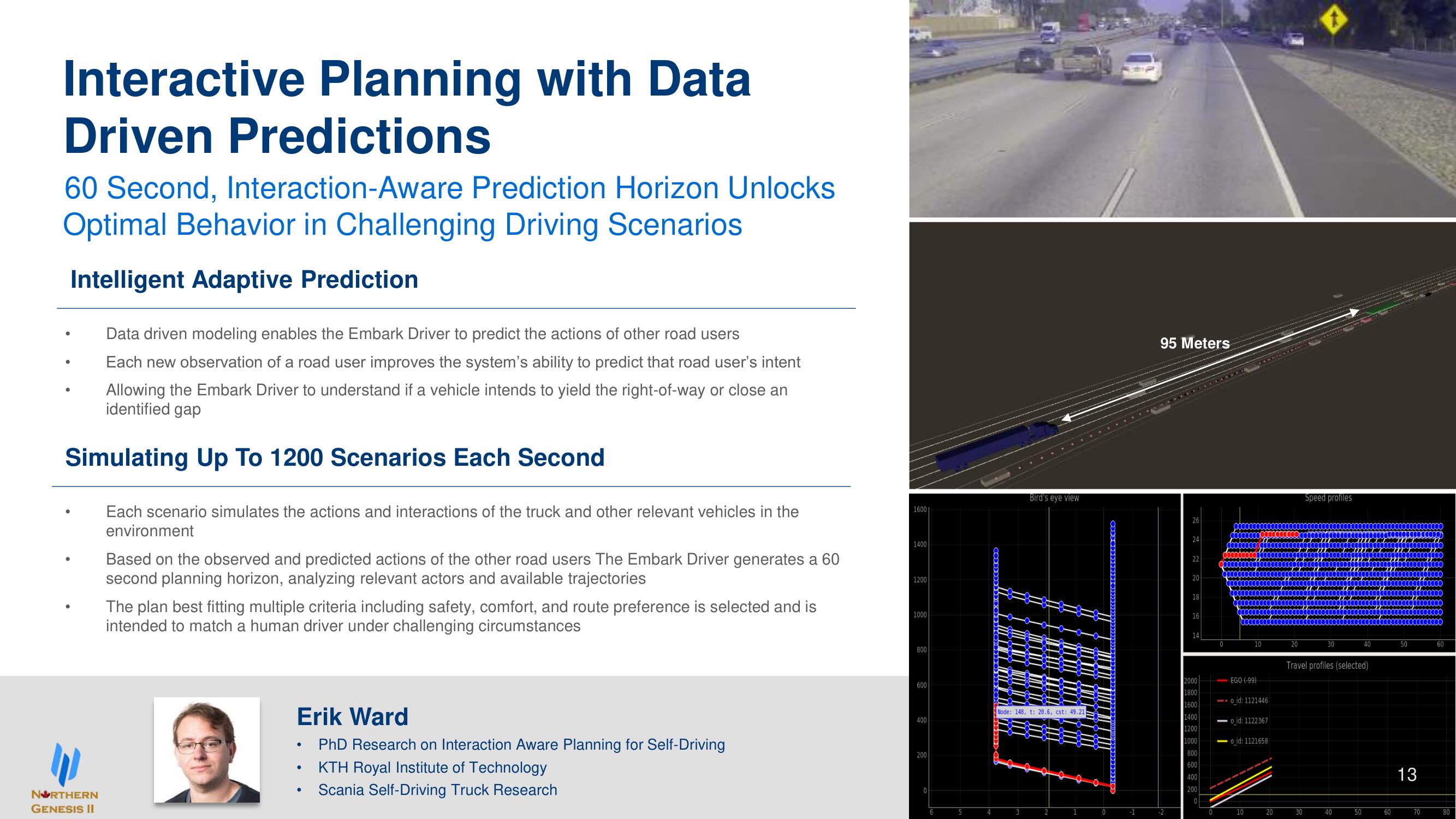
Intelligent Adaptive Prediction
Data driven modeling enables the Embark Driver to predict the actions of other road users
Each new observation of a road user improves the system's ability to predict that road user's intent
Allowing the Embark Driver to understand if a vehicle intends to yield the right-of-way or close an
identified gap
Simulating Up To 1200 Scenarios Each Second
Each scenario simulates the actions and interactions of the truck and other relevant vehicles in the
environment
Based on the observed and predicted actions of the other road users The Embark Driver generates a 60
second planning horizon, analyzing relevant actors and available trajectories
•
●
●
W
NORTHERN
GENESIS II
The plan best fitting multiple criteria including safety, comfort, and route preference is selected and is
intended to match a human driver under challenging circumstances
Erik Ward
PhD Research on Interaction Aware Planning for Self-Driving
KTH Royal Institute of Technology
Scania Self-Driving Truck Research
●
●
●
1600
1400
1200
1000
800
600
400
200
0
4
Bird's eye view
Node: 148, t: 20.6, cst: 49.21
2
0
-1
95 Meters
-2
26
24
22
20
18
16
14
2000
1800
1600
1400
1200
1000
800
600
400
200
0
U
10
EGO (-99)
o id: 1121446
o id: 1122367
o id: 1121658
10
20
20
Speed profiles
30
30
Travel profiles (selected)
40
40
50
60
13
70
60
80
theView entire presentation