Embark SPAC Presentation Deck
Vision Map Fusion & Scene
Understanding Enable Robustness
Moving Beyond Brittle, Map-Centric Approaches
Vision Map Fusion
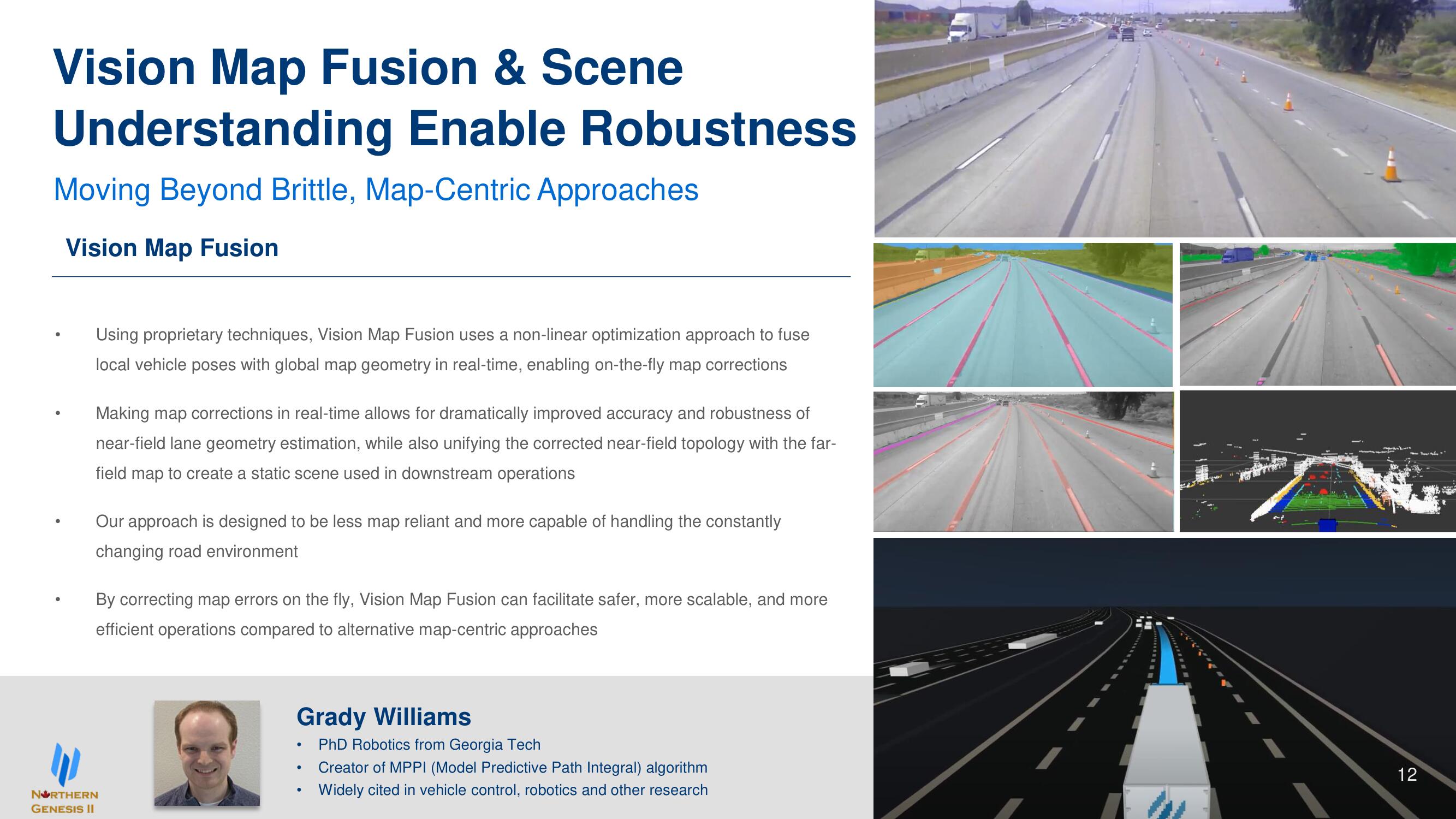
Using proprietary techniques, Vision Map Fusion uses a non-linear optimization approach to fuse
local vehicle poses with global map geometry in real-time, enabling on-the-fly map corrections
Making map corrections in real-time allows for dramatically improved accuracy and robustness of
near-field lane geometry estimation, while also unifying the corrected near-field topology with the far-
field map to create a static scene used in downstream operations
Our approach is designed to be less map reliant and more capable of handling the constantly
changing road environment
By correcting map errors on the fly, Vision Map Fusion can facilitate safer, more scalable, and more
efficient operations compared to alternative map-centric approaches
W
NORTHERN
GENESIS II
Grady Williams
●
PhD Robotics from Georgia Tech
Creator of MPPI (Model Predictive Path Integral) algorithm
Widely cited in vehicle control, robotics and other research
12View entire presentation